Vil du have en robotplæneklipper, der kører stabilt, klipper pænt og ikke sætter sig fast i hjørner, på skråninger eller ved kanter? Denne praktiske guide går direkte til de opsætningsvalg, der i praksis afgør resultatet: hjulgreb, terræn, hældning, kantklip, zoner, grænsekabel-placering og beskyttelse af udsatte områder.
Du får konkrete “sådan gør du”-trin, typiske fejl man ser i haver, og præcise løsninger, så du kan finjustere din installation uden gætteri. Undervejs får du små mini-konklusioner, så du kan tjekke dig selv og komme videre med det samme.
Hurtig definition: hvad er grænsekabel og hvorfor betyder det noget?
Et grænsekabel er den ledning, der afmærker robotplæneklipperens arbejdsområde og fortæller den, hvor den skal vende, hvilke passager der er tilladt, og hvilke områder der er forbudte. Det betyder noget, fordi 95% af driftsproblemer i almindelige haver skyldes kabelplacering, zonelogik eller fysiske forhindringer, ikke selve robotten.
Mini-konklusion: Får du styr på kabel og terræn, får du også styr på udkørsler, fastkørsler og ujævnt klipperesultat.
Hjulgreb og underlag: sådan får du trækkraft uden at ødelægge plænen
Hjulgreb handler om friktion mellem hjul og underlag. Tør, fast jord giver stabilt greb; våd lerjord, rødder, mos og løst grus gør hjulene lette at spinde. Når robotten spinner, opstår både huller i plænen og fejlstop.
Typiske opsætningsfejl med hjulgreb
- Klippehøjden sættes for lavt tidligt på sæsonen, så hjulene “pløjer” i blød jord.
- Robotten sendes gennem smalle passager med løs jord eller barkflis.
- Man accepterer mos og filtlag, som fungerer som en glat måtte under hjulene.
- Der lægges kanttråd for tæt på et hjørne, så robotten tager skarpe drej og slider græsset væk.
- Man forventer, at robotten kan køre på grusgang som transit, selv om den er designet til græs.
Løsninger der virker i praksis
Start med at øge klippehøjden og sænk den gradvist over 2–3 uger, så plænen kan bære. Hvis et område ofte er vådt, så luft jorden, topdress med sand og ret fald, så vand ikke samler sig. Overvej at skabe en fast “køreflade” på kritiske stræk: en smal stribe fliser i græsniveau eller en fast jordbane uden løst dæklag.
Mini-konklusion: God trækkraft er lige så meget havearbejde som teknik; løs bund og skarpe drej skaber de fleste hjulproblemer.
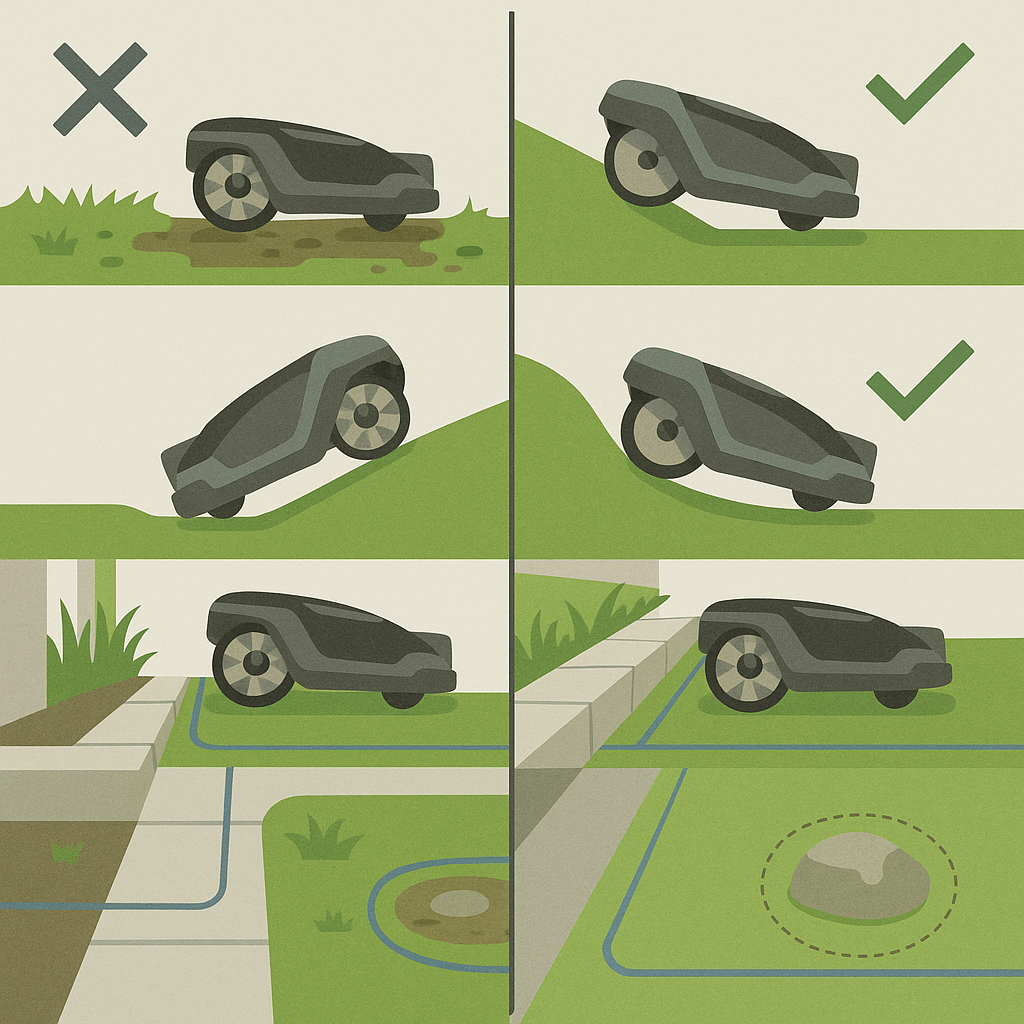
Terræn og hældning: mål rigtigt og planlæg kørsel på skråninger
Hældning er ikke kun et tal i manualen; det er også, hvordan skråningen ligger i forhold til kablet, og om robotten skal vende på skrå eller køre på tværs. En robot kan ofte klare mere, når den kører op og ned, end når den skal dreje på skrå.
En god tommelfingerregel er at teste den stejleste del i praksis: kør robotten der, mens græsset er fugtigt, og observer om den spinner ved vending. Hvis den gør, er problemet ofte vendepunktet, ikke selve stigningen.
Fejl: kablet ligger parallelt med hældningen
Når grænsekablet ligger langs en skråning, tvinges robotten til at følge skråningen og vende på den. Det giver spin, glid og “klatring” på kablet. Løsningen er at flytte kablet, så robotten i stedet rammer skråningen vinkelret, eller at lave en flad vendezone foroven/nedenfor skråningen.
Fejl: ingen sikkerhedsafstand ved skrå kanter
Ved skrænter, bedkanter og stensætninger er det fristende at lægge kablet tæt for at få “maks kantklip”. Men på hældning skal du give ekstra afstand, så robotten ikke tipper eller glider ud. Brug hellere en lille manuel kantfinish end at risikere fastkørsel.
Mini-konklusion: Det er vendingerne, der afslører hældningsproblemer; planlæg vendezoner, og lad robotten møde skråninger på den mest stabile måde.
Kantklip og kanter: pæne resultater uden at robotten kører skævt
Kantklip opleves som “kvaliteten” af en robotplæneklipper, men det er i høj grad et spørgsmål om kanttype. Flisekant i niveau med græs er lettest, mens høje kanter, løse sten og blød jord giver ujævne spor og efterlader striber.
Hvis du har mulighed for at ændre haven lidt, er den mest effektive forbedring ofte en stabil, plan kant: fliser i græsniveau eller en fast stål-/plastkant, der ikke giver efter. Det reducerer også behovet for kanttrimmer.
- Ved fliser i niveau: læg kablet, så hjulene kan køre delvist på flisen uden at skære ind i bedet.
- Ved bed med løs jord: læg kablet længere inde i græsset og accepter en smal kant, der trimmes.
- Ved mur/fast hegn: giv ekstra afstand, så robotten ikke støder hårdt og laver gentagne vendinger samme sted.
- Ved buede kanter: lav bløde kurver med kablet; skarpe knæk giver slidspor og ujævnt klip.
- Ved træer tæt på kant: giv plads til rodhævninger og undgå, at robotten “hopper” ind i stammen.
Mini-konklusion: Pænt kantklip kræver stabile kanter og bløde kabelkurver, ikke millimeterpræcision tæt på alt.
Zoner og passager: sådan undgår du, at robotten “glemmer” baghaven
I mange haver er der forhave/baghave, smalle passager eller et stykke græs bag et skur. Her er zoner og guidekabel (hvis din model bruger det) afgørende. Den klassiske fejl er at stole på tilfældig kørsel gennem en passage, der er for smal eller har for mange forhindringer.
Fejl: passagen er for snæver i praksis
Selv om en passage måler bred nok med et målebånd, bliver den smal, når græsset vokser ind, når hjulene skubber mod kanten, eller når robotten møder den i en skæv vinkel. Løsningen er at udvide passagen, rette kabelkurverne ud og fjerne “hak”, så robotten får en lige indkørsel. En flise i niveau kan også stabilisere.
Fejl: zoner får for lav prioritet eller forkert startpunkt
Nogle robotter kan sættes til at starte i bestemte zoner efter en tidsplan. Hvis baghaven aldrig når at blive klippet, skyldes det ofte, at startpunkter ligger for tæt på stationen, eller at zonetiden er for lav. Flyt startpunkter længere ind i zonen, og giv den “svære” zone flere ugentlige starter.
Hvis du mangler småting til at optimere zoner, fastgørelse eller kabelarbejde, kan du finde tilbehør til Stiga robotplæneklipper og bruge det til at gøre installationen mere robust i hverdagen.
Mini-konklusion: Zoner løser ikke sig selv; de kræver brede, stabile passager og startpunkter, der matcher havens geometri.
Grænsekabel-placering: afstande, hjørner og “usynlige” støjkilder
Grænsekablet skal ligge, så robotten både kan følge kanten og vende uden at ramme alt for hårdt. Derudover skal kablet beskyttes mod skader fra spader, vertikalskærere og gnavere. Mange fejl kommer af, at man lægger kablet “som det ser pænt ud”, i stedet for som robotten kører.
Her er en praktisk tjekliste, når du lægger eller retter kabel:
- Hold ensartede afstande langs samme kanttype; skift kun afstand, når kanttypen skifter.
- Undgå skarpe knæk; lav store, glatte buer i hjørner.
- Læg ikke kablet i lavninger, hvor vand står; vand blødgør jorden og øger risiko for kabelbrud.
- Kryds aldrig grænsekabel med sig selv; planlæg øer og indsnævringer, så signalet ikke forstyrres.
- Hold afstand til kraftige elkabler og dårligt afskærmede lampekabler, hvis din robot er følsom for støj.
- Fastgør ordentligt de første uger; når græsset gror over, bliver kablet stabilt.
Mini-konklusion: Et godt kabelspor er forudsigeligt for robotten; ensartethed og bløde kurver giver færre stop end “tæt på alt”.
Beskyttelse af udsatte områder: hjørner, træer, trampoliner og bede
Udsatte områder er de steder, hvor robotten møder mange beslutninger: skift i terræn, mange vendinger, eller genstande der flyttes. Det er her du får spor i græsset, slid på kablet og tilbagevendende fejl.
Hjørner og smalle lommer
Indsnævrede hjørner får robotten til at bakke, dreje og forsøge igen, hvilket slider græsset væk. Løsningen er at “runde” hjørnet ved at trække kablet i en bue, så robotten ikke kan køre ind i en blind lomme. Alternativt kan du fjerne hjørnet som klippeareal og lave et lille bed eller en fliseplads.
Træer, rødder og skyggepletter
Rodhævninger er en klassiker: robotten klipper fint i tørt vejr, men sætter sig fast, når det er fugtigt, fordi hjulene mister greb på den ujævne top. Planér området med topdressing, eller lav en lille ring af barkfri jord og læg kablet, så robotten ikke forsøger at køre hen over selve rodområdet. I skygge kan græsset være tyndt; her er en stabil kant eller en lille ø ofte bedre end at presse robotten tæt på.
Mini-konklusion: Beskyttelse handler om at reducere gentagne manøvrer; gør problemområder simple, runde og stabile.
Konkrete opsætningsfejl og hurtige løsninger: fejl → årsag → fix
Nedenfor får du de mest almindelige fejl, der skaber irritation i daglig drift, og hvad du gør ved dem. Tænk i tre trin: observer mønsteret, find årsagen i terræn/kabel, og ret med en lille ændring ad gangen.
- Robotten stopper i samme hjørne: kablet har et skarpt knæk eller en smal lomme. Fix: lav en bred bue og flyt kablet 10–20 cm.
- Den kører spor ved docking-området: for mange starter på samme linje og blød jord. Fix: styrk underlaget, flyt stationen en smule, eller justér startretning hvis muligt.
- Den når ikke en zone: passage for smal eller startpunkt for tæt på station. Fix: udvid passage, ret kabel, og flyt startpunkt længere ind.
- Den følger grænsekablet og “gnaver” kanten: for tæt kabel ved blød kant. Fix: læg kablet længere inde og stabilisér kanten med flise eller kantbånd.
- Den melder afbrudt kabel efter havearbejde: kabel ligger for højt eller ubeskyttet. Fix: læg kablet lidt dybere i udsatte zoner og markér ruten.
- Den spinner på en lille bakke: vending sker på skrå, eller underlaget er løst. Fix: flyt vendepunktet til fladere område og forbedr jordens bæreevne.
Mini-konklusion: Små kabeljusteringer på få centimeter kan løse store problemer, hvis du retter det sted, hvor mønsteret opstår.
Hvad koster det at rette installationen, og hvad er bedste praksis?
Omkostningen afhænger af, om du kun finjusterer kabel og terræn, eller om du bygger om. Mange rettelser kan klares med tid og simple materialer: nye pløkker, samlemuffer, lidt sand/topdressing og eventuelt en håndfuld fliser i niveau. Hvis du skal flytte større stræk kabel, kan du ofte genbruge det eksisterende og kun udskifte slidte samlinger.
Bedste praksis er at arbejde iterativt: ret én ting, test i to til tre klipninger, og justér igen. Dokumentér gerne med et par billeder af kablets forløb og noter om, hvor den stopper. På den måde ender du med en installation, der passer til din have, ikke kun til en standardtegning.
Mini-konklusion: Den billigste forbedring er systematisk test; mål, justér og gentag, før du køber dig til en løsning.



